中国领先的汽车电子解决方案提供商英恒科技控股有限公司(「英恒科技」或「集团」;股票代号:1760.HK)近日宣布,集团算法团队全自研StreamFusion视觉融合算法方案在自动驾驶领域全球权威评测nuScenes Detection Task中的“Camera, Radar”赛道获得关键性指标nuScenes Detection Score(NDS)达64.3%的高分,目前位居2023年全球范围评测名录第三名,并有望在短期模型迭代和训练之下进一步跃升。
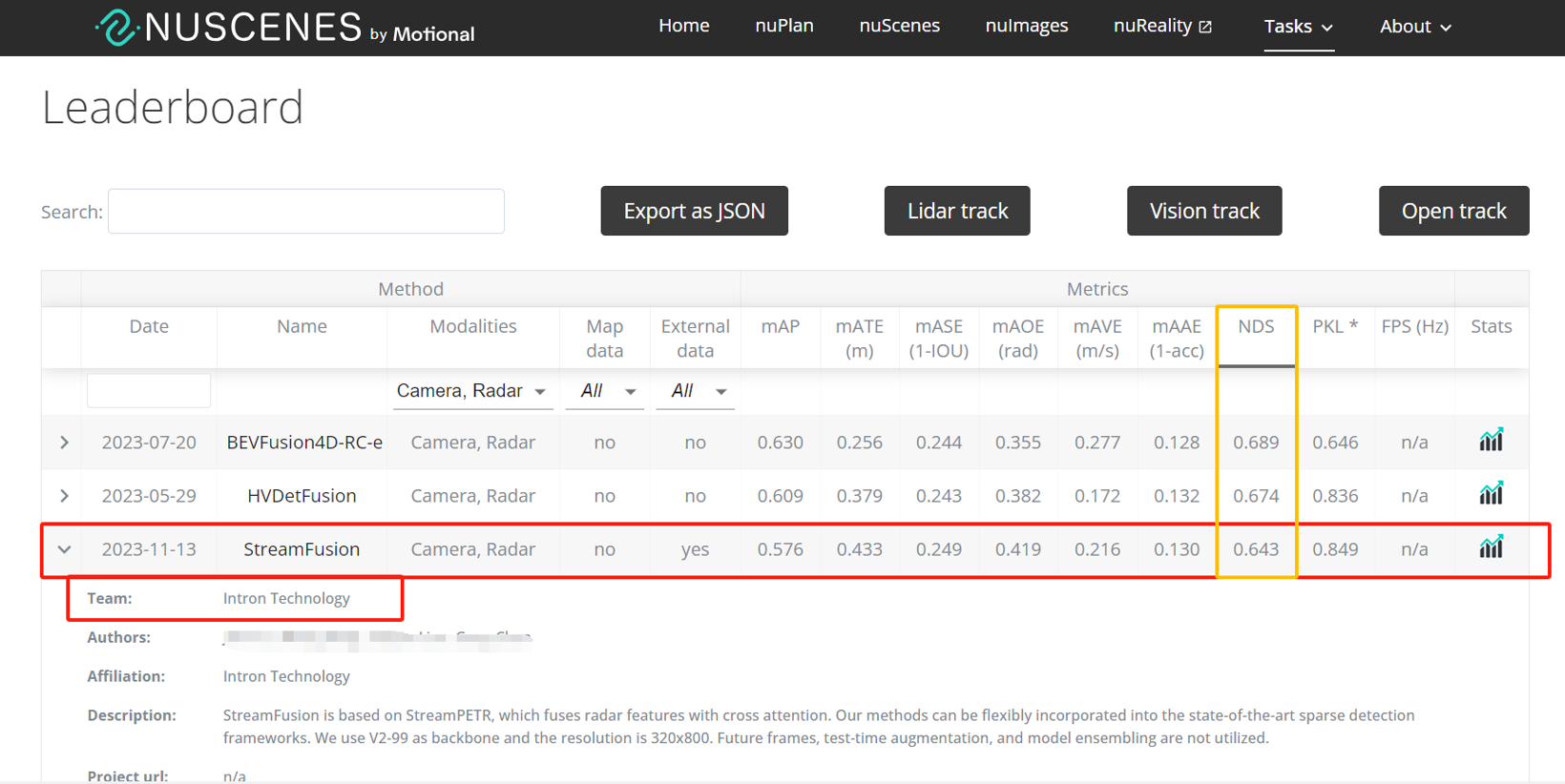
nuScenes Detection Task榜单(截止2023.11.22)
StreamFusion视觉融合算法方案展现了英恒科技在L3 级自动驾驶加速到来的背景下,充分运用自身多年硬件设计和软件开发的工程化服务经验,基于对行业全局及痛点的深刻理解,部署视觉-毫米波雷达原始数据融合方案并搭建全自研算法模型的能力。为更深层次解决系统成本过高问题进行研究,从自动驾驶感知、预测、规划控制模块组合中的感知层面,助力自动驾驶产业化和商业化的“破茧成蝶”。
nuScenes数据集是目前自动驾驶领域使用最广泛的公开数据集之一,也是全球权威的自动驾驶3D目标检测评测集。自2018年发布以来, nuScenes已成为测试感知算法在自动驾驶相关任务中表现的试金石。nuScenes Detection Score(NDS)作为一个综合指标,由平均准确度(mAP)、平均平移误差(ATE)、平均尺度误差(ASE)、平均方向误差(AOE)、平均速度误差(AVE) 和平均属性误差 (AAE)等多维度的测评数据组成。
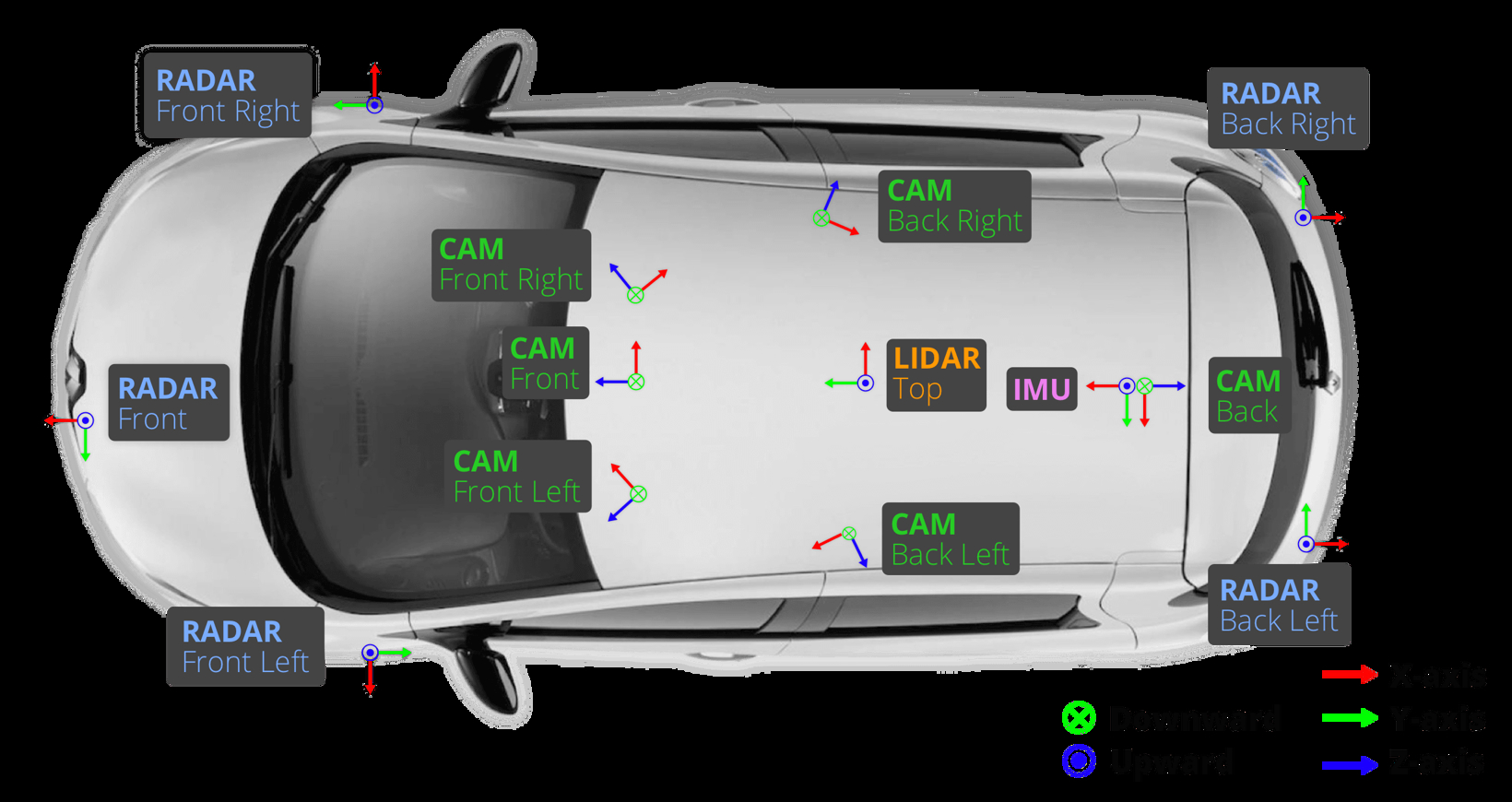
(图片来源:nuScenes)
英恒科技此次获高分评定的视觉与雷达感知新范式StreamFusion,是以毫米波雷达和摄像头为基础进行3D目标检测的视觉融合架构感知技术。英恒StreamFusion算法模型通过对图像和雷达数据进行特征提取、特征融合,同时引入历史帧信息,采用稀疏范式传递目标信息,达到大幅提高算法运行效率,实现跨模态下高鲁棒、高精度的3D目标检测结果。
(英恒科技StreamFusion方案架构示例图)
在自动驾驶产业化推进的关键节点,感知系统作为复杂多变的三维外部环境最核心最精准的信息入口,是自动驾驶真正落地的核心技术模块和关键突破层。Camera+Radar模式下的视觉融合方案具备低成本、高性价比和易部署等特点,在推动自动驾驶L3落地方面具有较高的行业共识。不断训练与优化视觉融合平台的算法模型,最大程度提升3D目标检测的效率和精准度,是英恒科技以算法为切入点扩展自动驾驶技术能力、赋能产业的又一布局。
英恒科技联席创办人、主席及联席行政总裁陆颖鸣先生表示:「L3 级自动驾驶的产业化落地将成为行业的一道重要分水岭。英恒科技以核心硬件工程服务、底层软件开发的深厚积累强势赋能,同时也抓住AI感知技术对于自动驾驶产业化落地的变革式意义,以符合主流范式又秉承创新的产品力争上游。未来我们将持续性突破算法模型,以期与全行业共同见证自动驾驶技术的商业化拐点到来。」
有关英恒科技控股有限公司
英恒科技控股有限公司是中国领先的汽车电子解决方案提供商,专注于提供新能源、智能驾驶、智能网联、车身控制、安全及动力传动系统的关键汽车电子部件解决方案。集团运用自身工程研发实力,并结合先进半导体器件,向客户提供完整的产品化解决方案,助力整车厂达到行业领先水平。英恒科技获纳入摩根士丹利中国指数(MSCI China Index)及富时罗素全球股票指数系列(FTSE Global Equity Index Series)。
推荐阅读:
“暖心相伴,人保护航”中国人保携手温州市车域汽车综修厂宣传活动
工信部副部长辛国斌:支持中国印尼两国企业在新能源汽车等工业领域务实合作
专题推荐: